
|
I am Kun Chen, an undergraduate student in Automation at College of Artificial Intelligence, Harbin Institute of Technology, Shenzhen, and I am expected to receive my B.Eng. in Jul. 2026. My research focuses on map building and collaborative planning for heterogeneous multi-robots at the Networked Robotics and Systems Lab (nROS-Lab), supervised by Prof. Haoyao Chen. My current research is centered on exploration 🤖 and navigation 📍 of mobile robots within complex environments. I am also keen on leveraging machine learning techniques to tackle sophisticated robotic challenges🦾. My aim is to advance robotic intelligence 💡 and optimize human-robot interaction🤝. CV / Google Scholar / |
|
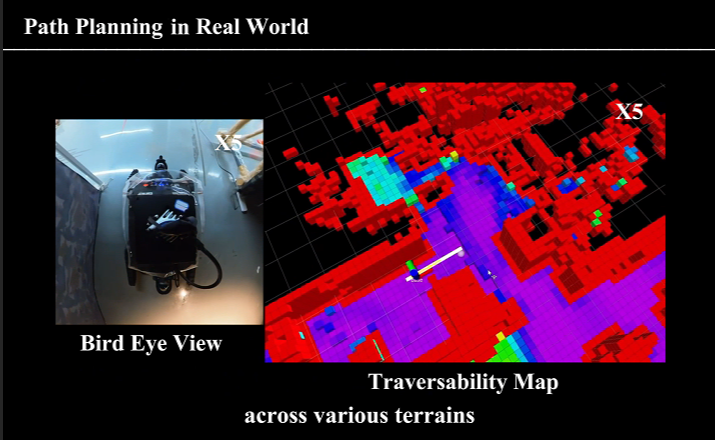
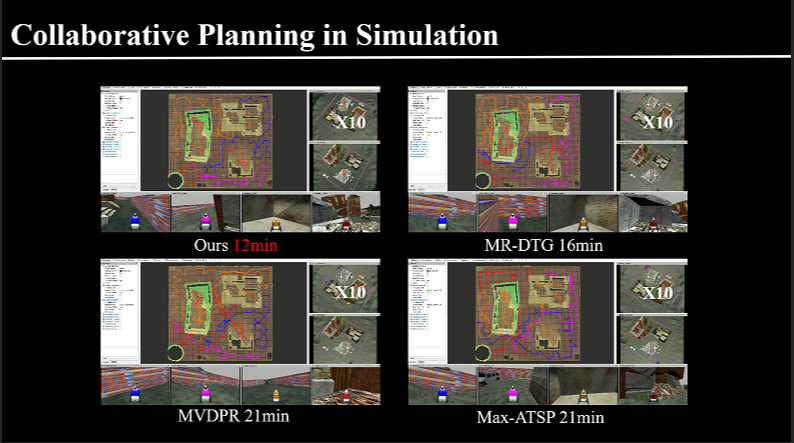
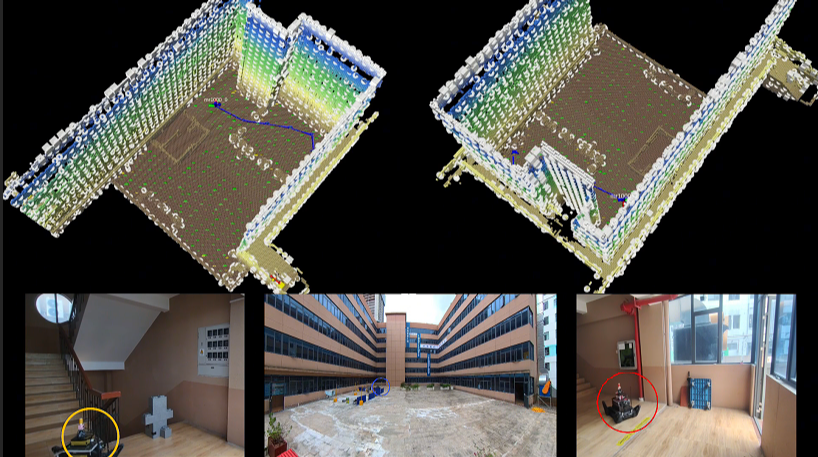
My current research topics include map construction and task planning for mobile robots, focusing on enhancing the autonomy of mobile robots in disaster rescue scenarios. |
|
Yuxiang Li, Kun Chen, Yifei Wang, Weifan Zhang, Jiancheng Wang, Haoyao Chen, Yunhui Liu Accepted to IEEE Transactions on Robotics(T-RO) 2025 IEEE Xplore Github |
|
Yuxiang Li*, Kun Chen*, Haoyao Chen Accepted to 2024 International Annual Conferenceon Complex Systems and Intelligent Science (CSIS-IAC) IEEE Xplore |
|
Yuxiang Li*, Kun Chen*, Haoyao Chen In preparation to IEEE Transactions on on Robotics(T-RO) 2026 |

|
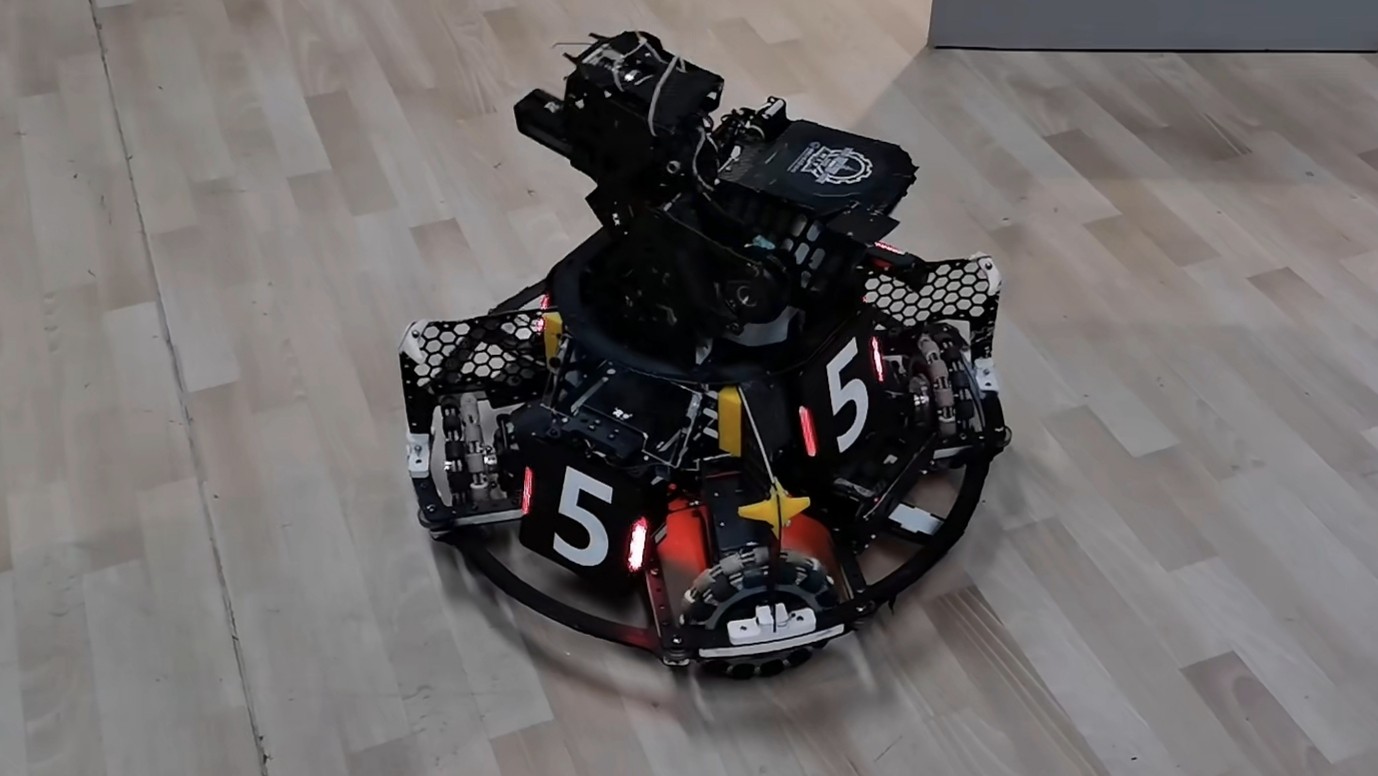
2022 RoboMaster University Championship Keywords: Motion Control, Wheeled Chassis Robot, Hardware and Wiring Architecture Design Developed a infantry robot based on the STM32F407ZG microcontroller. Integrated CAN bus for connecting all motors and precisely controlling the robot's gimbal, friction wheels, and Mecanum-wheeled chassis. Implemented UART serial communication with the host computer to enable keyboard and mouse control as well as real-time UI rendering. |
|
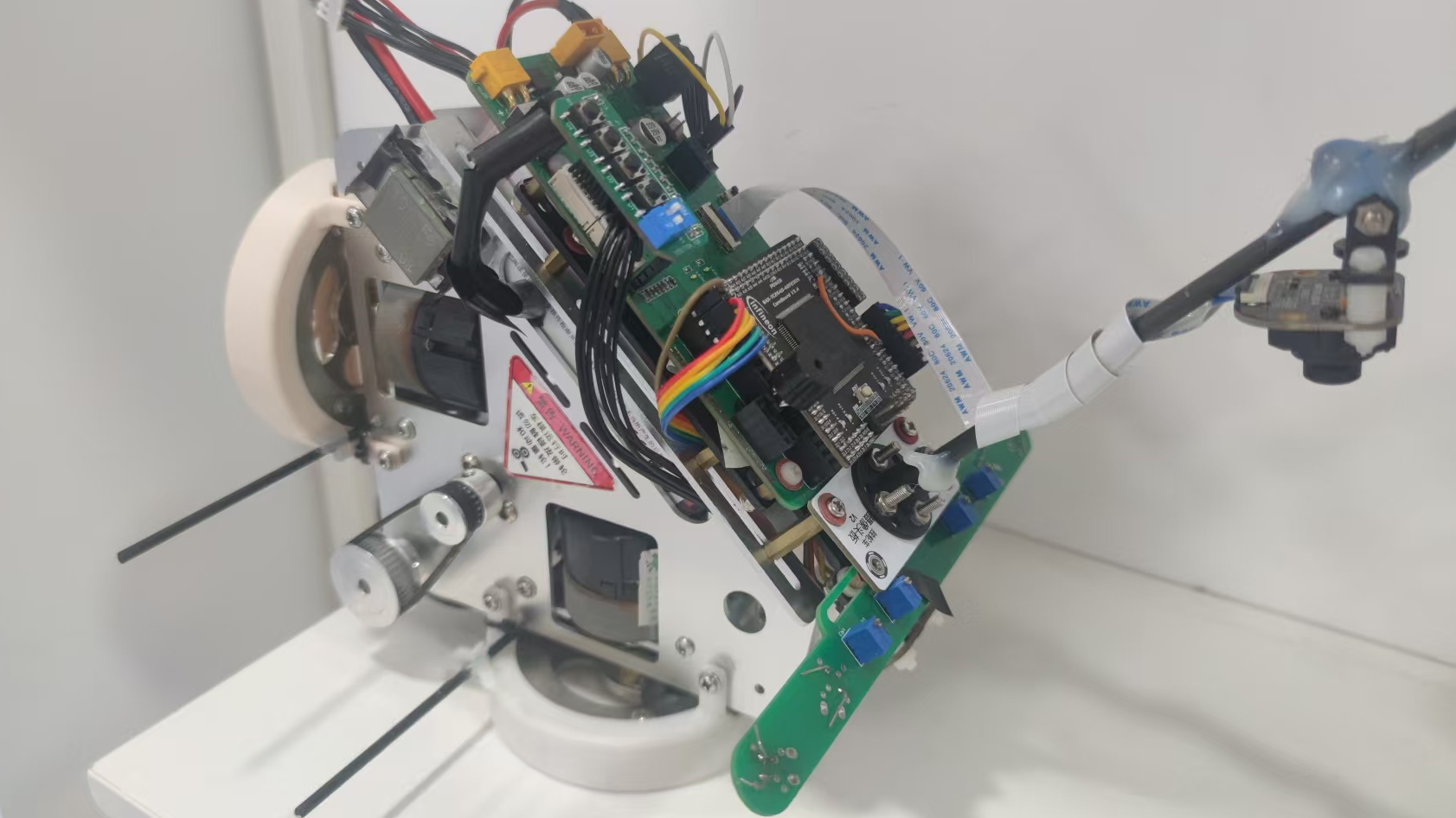
The 18th National Undergraduate Smart Car Contest(Self-Balancing Monowheel Group) Keywords: Image Recognition, Inertial Navigation System, Mechanical Design, Hardware Design Developed a self-balancing monowheel based on the Infineon TC264 microcontroller. Integrated a camera to collect image data, identify track element types and plan the driving path. Proposed an inertial-navigation-based docking method to ensure reliable navigation when visual data degrades. |
Best Bachelor Thesis Award of HITsz in Automation |
Harbin Institute of Technology, Shenzhen 2025 |
Outstanding Graduates of HITsz |
Harbin Institute of Technology, Shenzhen 2025 |
National Scholarship |
Ministry of Education of the People's Republic of China 2024 |
National Scholarship for Encouragement |
Ministry of Education of the People's Republic of China 2022, 2023 |
First-Class Academic Scholarship |
Harbin Institute of Technology, Shenzhen 2022 |
National First Prize in RoboMaster University Championship (RMUT) |
RobotMaster Organizing Committee 2022 |
|
Modified version of template from here Last updated: 31 July 2025 |